













Deploying and Demonstrating Navigation Aids on the Lunar Surface
NASA is developing lunar navigation beacons to be deployed on spacecraft or the lunar surface to aid in localization and help future space vehicles determine position, velocity, and time to high accuracy.
Deploying and Demonstrating Navigation Aids on the Lunar Surface
PROJECT
Lunar Node-1 (LN-1)
SNAPSHOT
NASA is developing lunar navigation beacons to be deployed on spacecraft or the lunar surface to aid in localization and help future space vehicles determine position, velocity, and time to high accuracy.
“Are we there yet?” is a constant question on any journey. As humanity expands its presence on, near, and around the Moon, new systems are needed to provide navigation signals similar those provided by the Global Positioning System (GPS) on Earth. To enable this capability, NASA is supporting research on a range of sensors, architectures, and techniques for providing reference signals to help spacecraft and humans find their way.
Lunar Node 1 (LN-1) is an S-band navigation beacon for lunar applications that was recently designed and built at Marshall Space Flight Center (MSFC). As part of NASA’s Commercial Lunar Payload Services (CLPS) initiative, this beacon is scheduled to be delivered to the Moon’s surface on Intuitive Machine’s NOVA-C lunar lander on the IM-1 mission in early 2024.
During this mission, LN-1’s goal will be to demonstrate navigation technologies that can support local surface and orbital operations around the Moon, enabling autonomy and decreasing dependence on heavily utilized Earth-based communication assets like NASA’s Deep Space Network demonstrate these capabilities, LN-1’s design leverages CubeSat components as well as the Multi-spacecraft Autonomous Positioning System (MAPS) algorithms, which enable autonomous spacecraft positioning using navigation measurements. In addition to demonstrating the MAPS algorithms, LN-1’s radio will also be used to conduct pseudo-noise (PN)-based, one-way, non-coherent ranging and Doppler tracking to provide alternate approaches and comparisons for navigation performance. To provide a real-time solution similar to GPS, but in the lunar environment, multiple references must be in view of users at the same time. As this future lunar communication network is deployed, LN-1 hardware and capabilities could be part of a much larger infrastructure.
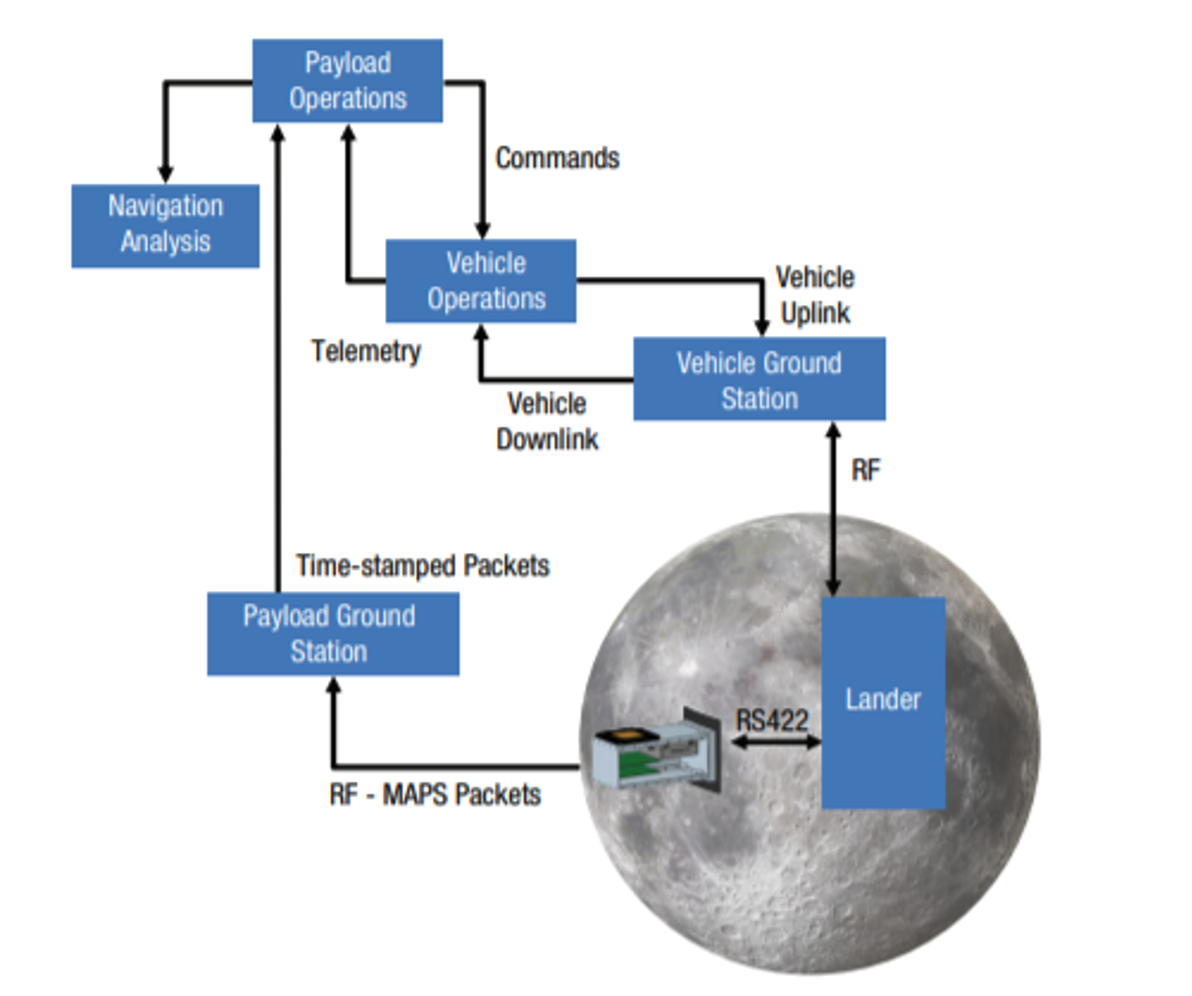
Over the course of the transit to the Moon from Earth and during its the nominal lunar surface operations, LN-1 will broadcast its state and timing information back to Earth. Once it lands on the lunar surface, the payload will enter into a 24/7 operational period, and will also provide a navigation reference signal back to Earth. To validate LN-1 capabilities, DSN ground stations will be used to capture measurements and measure performance. Upon reception of the LN-1 data, high-accuracy packet reception timestamps will be used (along with atmospheric data for induced delays) to assess a ranging observation. This data will be captured during multiple passes to compute a navigation state of the payload during the mission. The LN-1 team is also partnering with other NASA researchers to collect Very Long Baseline Interferometry observations of the navigation signals as an independent truth reference.
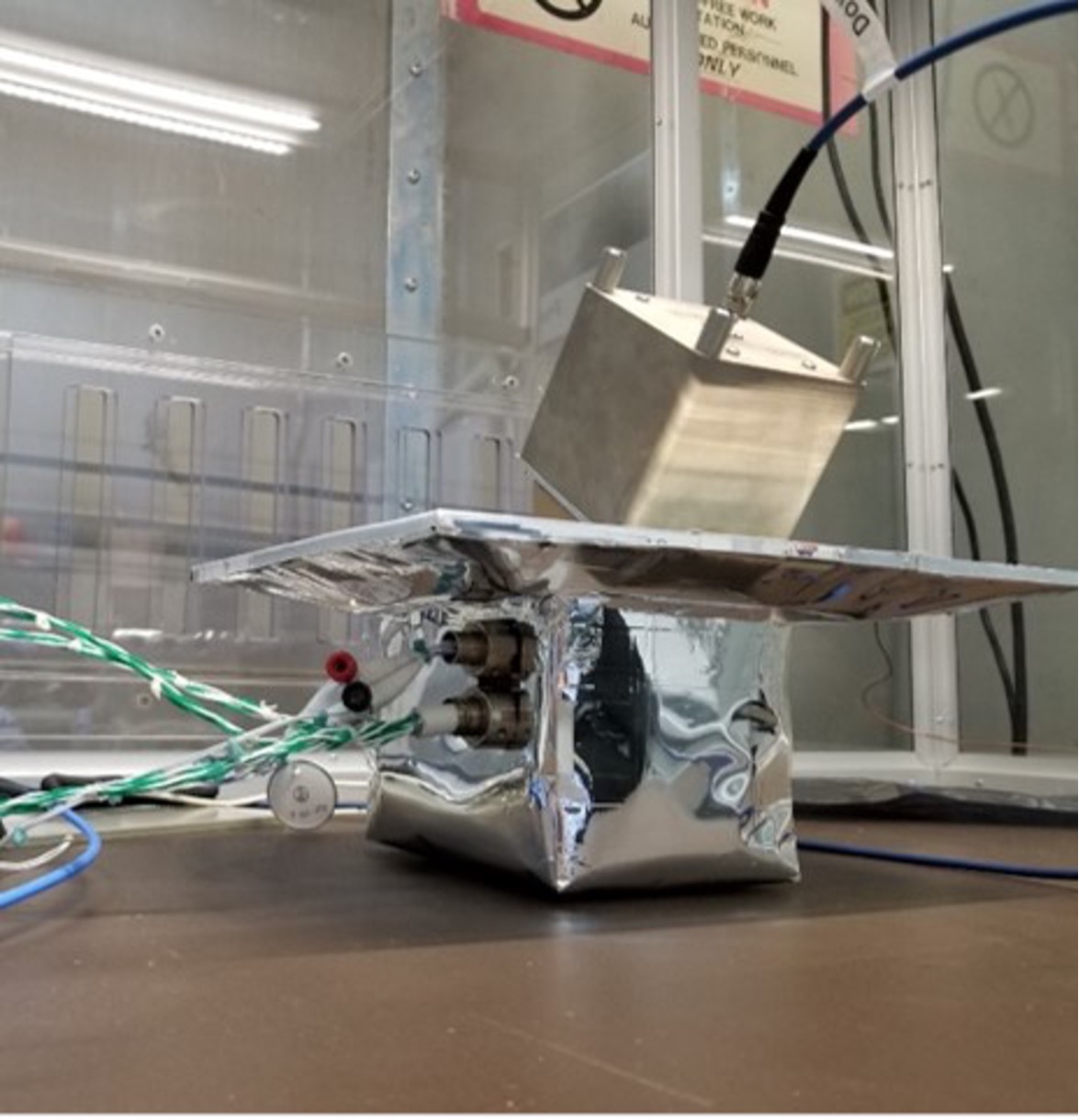
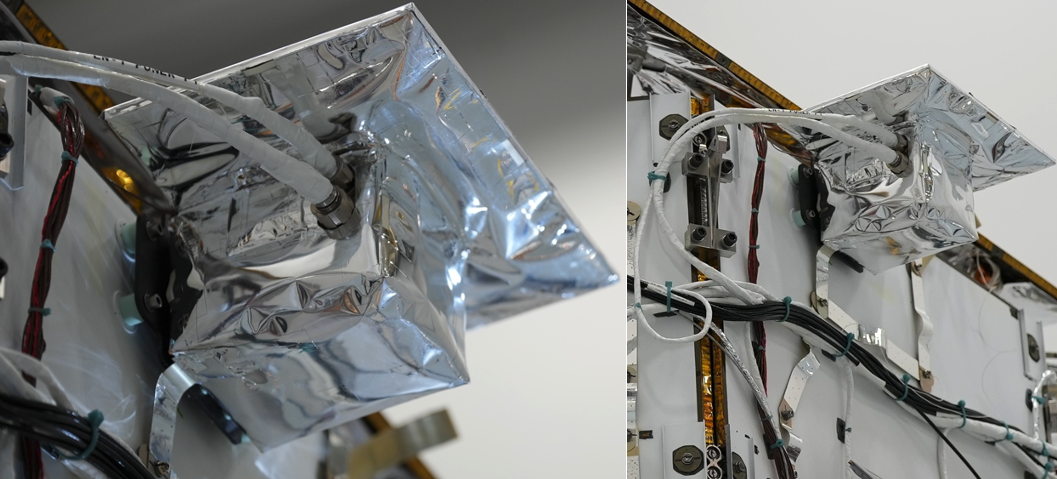
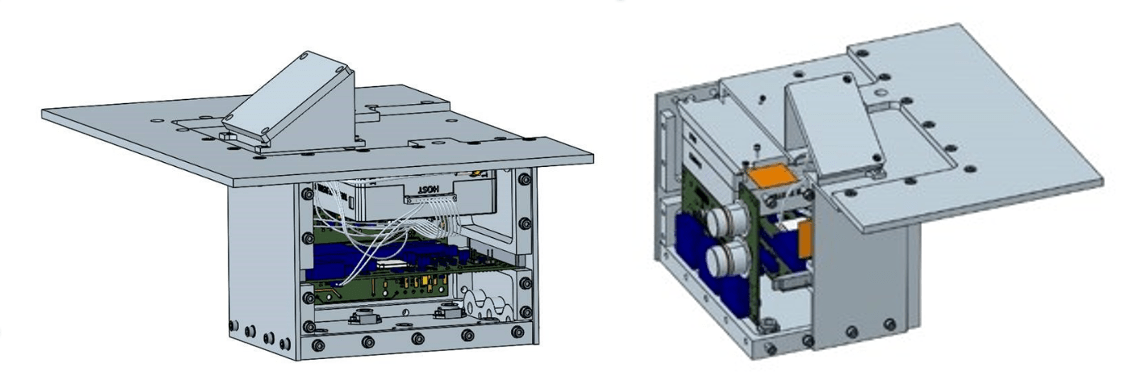
The compact size of the LN-1 payload can be seen in the LN-1 CAD models in the figures below. The primary LN-1 structure is approximately 175x220x300 cm in volume with a mass of approximately 2.8 kg. The dominating feature of the design is the large top surface, which is a radiator. The hot environment on the lunar surface, combined with the heat generated by the LN-1 radio while transmitting, require the LN-1 design to incorporate a radiator to dissipate heat during operation so that a clean interface with the host vehicle will be maintained. While the LN-1 payload is not designed to survive the lunar night, it uses a modular design that could be integrated into a variety of host vehicles; if adequate power generation/storage were provided, the design may be able to offer long-term operation at any lunar landing site.

After completion and delivery of the LN-1 payload, testing with the planned operational ground stations began. This testing included RF compatibility testing between the DSN and the LN-1 payload as well as tests of the data flows between the DSN and MSFC’s Huntsville Operations Support Center. Performed at the DSN’s Development and Test Facility (DTF)-21 facility in early 2021, these tests successfully verified RF compatibility between DSN and the LN-1 payload. Specifically, the tests showed that the DSN can receive S-band telecommunication signals in all the planned operational modes required to process telemetry and ranging data from LN-1.

In the future, this new technology and the MAPS algorithms demonstrated by LN-1 could enable autonomous navigation for lunar assets. As NASA invests in communication and navigation infrastructure around, near, and on the Moon, the LN-1 team continues to develop future iterations of the navigation beacon to support broad lunar surface coverage. The team is currently maturing the capabilities of the payload in preparation for continued laboratory assessments and field demonstrations using updated navigation signals as defined for LunaNet. Three key capabilities will be the focus of the development of a follow-on payload to LN-1:
- Demonstration of inter-spacecraft navigation, providing support to operational vehicles in lunar orbit by acting as a fixed ground reference
- The capability to survive the lunar night onboard the payload to demonstrate technologies needed for a long-term navigation beacon
- Maturation of signal to match the Augmented Forward Signal standard as defined in the LunaNet Interoperability Specification for integration, operation, and compatibility with other planned NASA assets and infrastructure
PROJECT LEAD
Dr. Evan Anzalone and Tamara Statham, NASA Marshall Space Flight Center (MSFC)
SPONSORING ORGANIZATION
NASA-Provided Lunar Payloads Program
What's Your Reaction?