













Sols 4168-4170 Reaching the “Pinnacle” of Gediz Vallis Ridge (Pinnacle Ridge)
Earth planning date: Friday, April 26, 2024 Today we had a typically challenging Friday for planning. We are parked at the base of Pinnacle Ridge, with an interesting dark block named “Bilko Pinnacle” in our workspace (shown in the image). This is the first block that is part of the Pinnacle Ridge part of the […]
4 min read
Sols 4168-4170 Reaching the “Pinnacle” of Gediz Vallis Ridge (Pinnacle Ridge)
Earth planning date: Friday, April 26, 2024
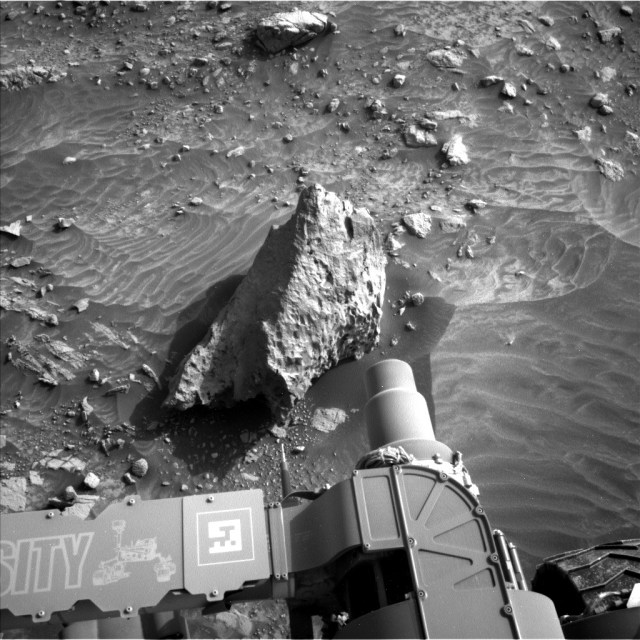
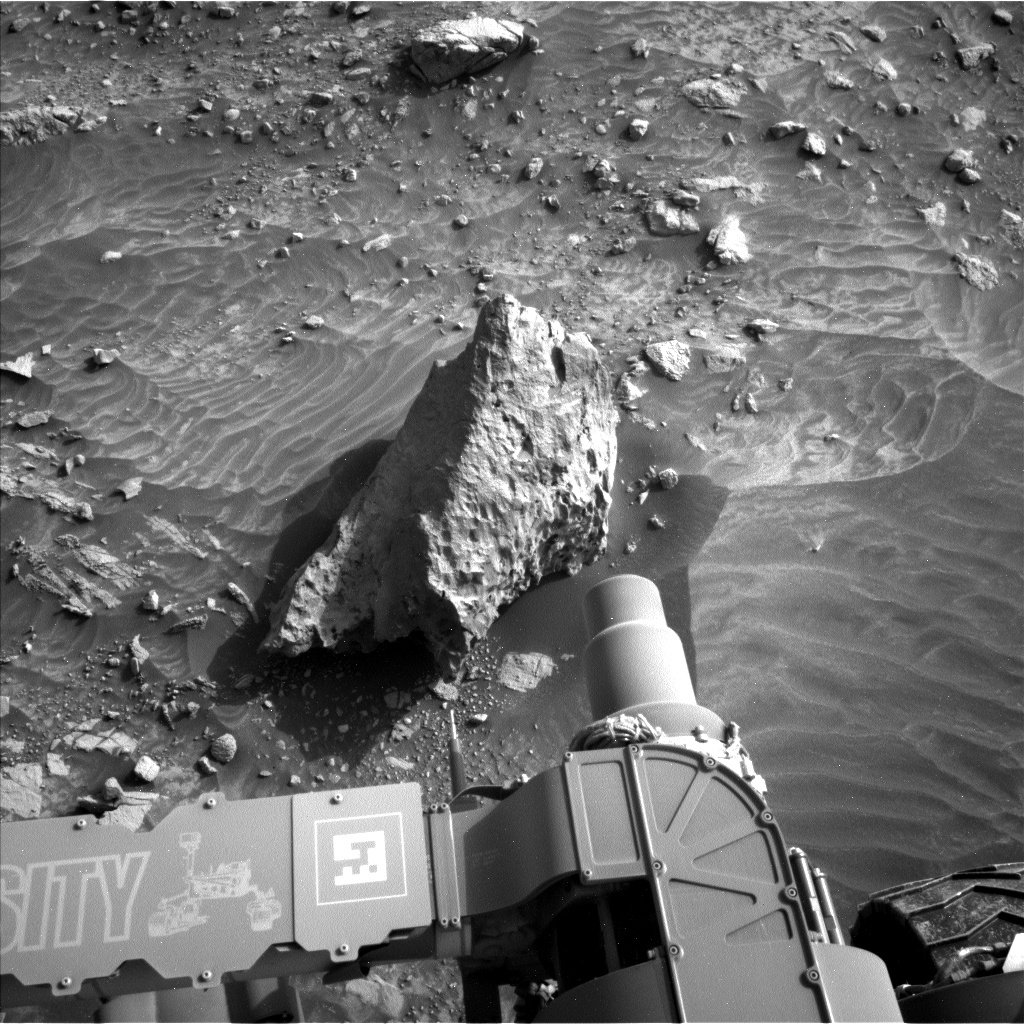
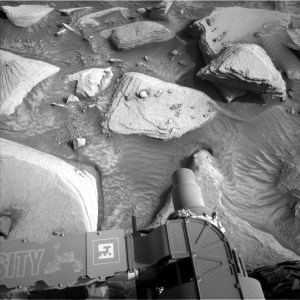
Today we had a typically challenging Friday for planning. We are parked at the base of Pinnacle Ridge, with an interesting dark block named “Bilko Pinnacle” in our workspace (shown in the image). This is the first block that is part of the Pinnacle Ridge part of the upper Gediz Vallis Ridge that we’ve been able to examine up close. As Arm Rover Planner (RP), I had fun sequencing the arm activities on this challenging target.
We begin the first sol of our plan with a lot of remote science. ChemCam is taking LIBS mosaics of “May Lake,” a small block that is tilted, and “Pavilion Dome,” another large dark block in the workspace. ChemCam also is taking a 3×3 RMI mosaic of a distant cluster of dark pyramidal blocks. Mastcam then takes large mosaics of two different targets on Pinnacle Ridge and a target called “Sharktooth Peak,” which is a cluster of blocks that we will be approaching in the future. After a nap, Curiosity will wake up and begin contact science on the Bilko Pinnacle target. This target was very challenging because it is quite tall and the sides are steep, making placing the arm on the block difficult without colliding the turret either with the ground or other parts of the rock. It is also a very rough surface with bumps and pits, making it (unfortunately) impossible to brush. We are taking MAHLI images 25cm above the Bilko Pinnacle target from 3 different orientations, which allows us to make high-quality 3D images of the rock. We also did a standard 5cm stereo pair and a 2cm close approach. The lumpy surface made it unsafe to get to 1cm. We then have a second contact science target named “Pipsqueak Spire,” which is a small light-toned rock, on which we did a 20cm and 5cm stereo pair. This target was also a challenge because it is close the rover; as a result, we could not reach a normal 25cm standoff. We then did nighttime APXS observations on both targets and stow the arm. After putting the arm to bed, we are planning a CheMin activity analyzing an internal calibration standard to track performance.
The next morning, Curiosity will do additional remote science while CheMin saves out all its data. ChemCam is taking a LIBS mosaic of “Oh Ridge,” which is a small, dark rock chip and an RMI mosaic of Kukenan to look at the tilted stratigraphy. Mastcam will also image May Lake and Oh Ridge, as well as taking additional mosaics of Pavilion Dome and Pinnacle Ridge. After a nap, Curiosity will wake up and do a short drive to get a light-colored block (which is 2 meters away) into the workspace. The science team will be interested to compare it to today’s dark block. Sometimes short drives are the most challenging. In this terrain, we need to be very careful about where we park to be sure we are safe to unstow the arm. We also need to be careful to make sure we aren’t parking facing a direction where parts of the rover could block the antenna’s view of Earth and prevent communication. And, we needed to make sure we didn’t drive over the large Bilko Pinnacle block, which is between us and the light-colored block. In this case, the Mobility RP needed to plan a drive more than 4 meters long to move to the new spot away to satisfy all of the constraints. After the drive, we do a sun update to reduce the error in our attitude estimate and then take our standard post-drive workspace imaging, drive-direction imaging and MARDI twilight image.
On the third (and last) sol of the plan, Curiosity will do some additional imaging. This includes an AEGIS activity that will pick an interesting target as well as several Navcam atmospheric Navcam images and deck monitoring and a late-afternoon Mascam solar tau. Finally, in the early morning, we have a standard weekend AM environmental science block with another Mastcam solar tau and Navcam atmospheric observations.
Written by Ashley Stroupe, Mission Operations Engineer at NASA’s Jet Propulsion Laboratory
Share
Details
Related Terms
Explore More




What's Your Reaction?