













Sols 4341-4342: A Bumpy Road
Earth planning date: Monday, Oct. 21, 2024 After Curiosity’s busy weekend, the team is ready for another day of planning. We are able to take advantage of the Earth-Mars time offset to full plan on both sols of our plan today. For this plan, I served as Mobility Rover Planner, and planned Curiosity’s drive. The […]
4 min read
Sols 4341-4342: A Bumpy Road

Earth planning date: Monday, Oct. 21, 2024
After Curiosity’s busy weekend, the team is ready for another day of planning. We are able to take advantage of the Earth-Mars time offset to full plan on both sols of our plan today. For this plan, I served as Mobility Rover Planner, and planned Curiosity’s drive.
The first sol begins with some remote science. In this block, there is a ChemCam LIBS and Mastcam joint observation of “Ewe Lake,” to look for variation across the different layers in the rock. There is also a ChemCam RMI and a Mastcam of the “Olmstead Point” target, to see if there are chemical differences that make it darker than the surrounding rocks. Mastcam also is taking a stereo image of “Depressed Lake” (in order to see if this loose block belongs to the Stimson or the Sulfate units) and an image of the ChemCam AEGIS target the rover automatically found after the last drive.
After a nap, Curiosity wakes up to do some contact science on the “Chuck Pass” target, which is a piece of bedrock with laminations and nodules. We perform DRT brushing, MAHLI, and APXS observations of this rock before stowing the arm so we can be ready to drive on the second sol. In the late afternoon, to take advantage of the lighting conditions, we have another short set of Mastcam imaging — an atmospheric sky column observation and a stereo mosaic of “Fascination Turret” from this new angle.
The second sol also kicks off with some remote sensing. We follow up the contact science with ChemCam LIBS and Mastcam of Chuck Pass. ChemCam also takes an RMI looking east back to the area of the white sulfur stones below “Whitebark Pass” to get yet another viewing angle. There is also some atmospheric imaging, Navcam deck monitoring (to see how the dust is moving around on the rover’s deck) and a large dust devil survey.
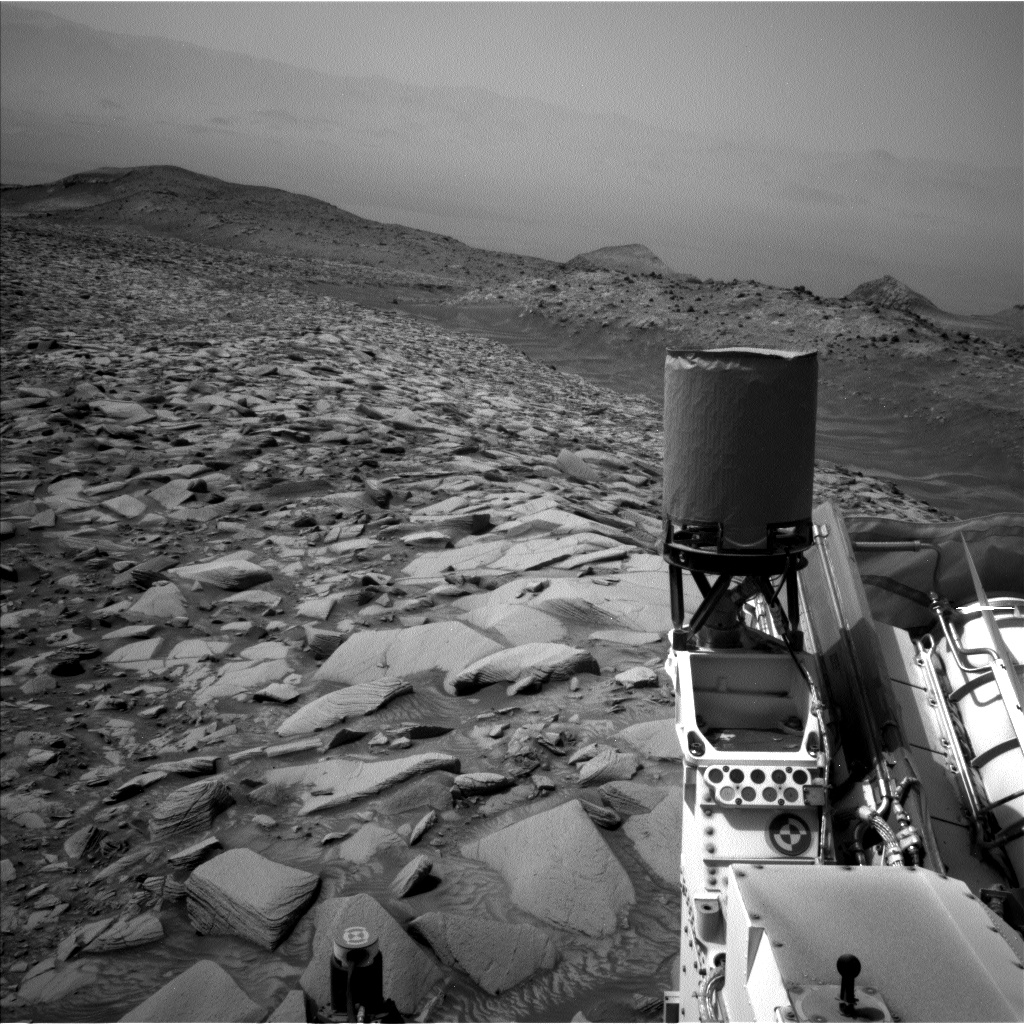
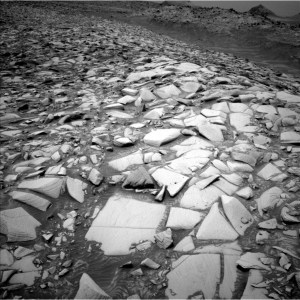
After the imaging, we are ready to drive. This terrain has been very tricky. While the slopes are not steep, this is a very rocky area, as you can see in the image, making finding a safe path difficult. We don’t only need to worry about driving over things that are too big or too sharp, but we also have to make sure not to scrape the wheels along the side of a rock or steer them into a rock, making them wedge and stall. It also means that we do not have good stereo data out very far because the rocks block our view. The last complication is that we have to drive backwards — otherwise, the rover hardware will block Curiosity’s view of Earth during the time we want to send her the new plan. When we drive backwards, the rover hardware will block Curiosity’s view, so we need to turn to get a clear view in our images. We also take additional frames to be sure we can find the best path for the next drive. With all this, we ended up being able to drive about 32 meters today (about 105 feet). After a short diversion to get around a steering hazard, we were able to drive a fairly straight route along the path to our next major imaging stop. After the drive, we have our normal post-drive imaging, including a twilight MARDI image.
We have been lucky so far on this terrain and been able to successfully complete our recent drives. Hopefully this drive will also be successful!
Written by Ashley Stroupe, Mission Operations Engineer at NASA’s Jet Propulsion Laboratory
Share
Details
Related Terms
Explore More



What's Your Reaction?